
- Urządzenie DPT
- Klasyfikacja silników PT
- Cechy działania silników zaworów
- Właściwości urządzenia bezszczotkowego
- Struktura sprzętu typu stepping
- Zasada działania
Geneza idei silnika prądu stałego (DCT) pojawiła się na początku XIX wieku. Słynni fizycy Alessandro Volta, M. Faraday i P. Barlow wprowadzili swoją wizję tego procesu do historii. B. S. Jacobi uważany jest za wynalazcę silnika elektrycznego, ponieważ to on zdołał wyprodukować urządzenie z wirującą armaturą, które można zastosować w praktyce. Chociaż pierwszy silnik miał niską moc, następny już wprawił łódź w ruch.
 >
>
Urządzenie DPT
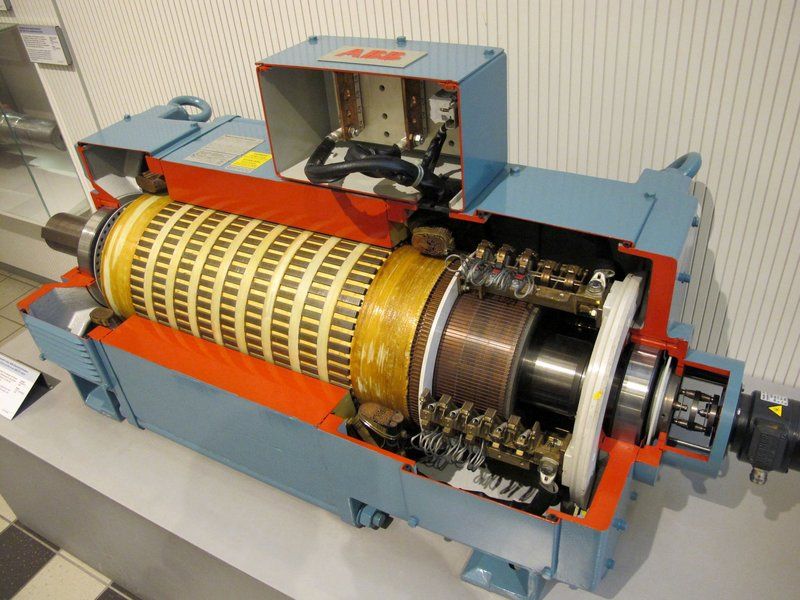
Głównymi częściami elektrycznej maszyny prądu stałego są magnesy i uzwojenia. Części pomocnicze obejmują obudowę, rdzeń, wałek, kolektor i mechanizm szczotkowy. Wszystkie te szczegóły mają swój cel.
Rdzenie ruchomych i stałych części nie są wykonane z całościowej konstrukcji, ale z blach ze stali elektrycznej. Ta cecha strukturalna umożliwia praktycznie wyeliminowanie prądów wirowych.
Bezpośrednim obowiązkiem kolektora jest przekształcenie prądu przemiennego wytwarzanego w uzwojeniu twornika na stały. Kolektor to jednostka specyficzna dla maszyn prądu stałego. Ale jest również najbardziej wrażliwy, ponieważ prawie połowa wszystkich silników elektrycznych ulega awarii podczas pracy właśnie z powodu awarii. Brak kolektora w strukturze maszyny asynchronicznej lub synchronicznej poprawia jego niezawodność. Ta zaleta pozostaje zarówno w przypadku trójfazowych, jak i jednofazowych maszyn prądu przemiennego.
Sterowanie silnikiem prądu stałego pociąga za sobą zmianę prędkości obrotowej, ponieważ jego głównym zadaniem jest uruchomienie mechanizmów operacyjnych. Prędkość obrotową można zmienić na trzy sposoby:
- zmiana dostarczanego napięcia;
- zmiana rezystancji w obwodzie twornika;
- zmiana strumienia magnetycznego w obwodzie wzbudzenia.
Klasyfikacja silników PT
Różnice między rodzajami silników elektrycznych dotyczą rodzaju magnesów i metody wzbudzenia. Magnesy mogą być trwałe lub elektromagnesy. Zalety magnesu stałego (w przeciwieństwie do elektromagnesu):
- zwartość;
- Nie wymaga źródła energii do działania.
Wady to niemożność dostosowania siły strumienia magnetycznego i rozmagnesowania w czasie.
Rodzaj wzbudzenia DCB zależy od punktu połączenia uzwojenia biegunowego. W tym względzie rozróżniają między niezależnym wzbudzeniem silnika (uzwojenie wzbudzenia jest zasilane z zewnętrznego źródła) a samowzbudzeniem (uzwojenie wzbudzenia jest połączone z uzwojeniem twornika). Podekscytowane silniki mają krótsze nazwy:
- bocznik (równoległe połączenie uzwojeń);
- szeregowy (szeregowe połączenie uzwojeń);
- związek (mieszane połączenie uzwojeń).
Silniki elektryczne są stosowane w różnych gałęziach przemysłu i rolnictwa, a także w instalacjach domowych. Ich różnorodność jest świetna. Główne rodzaje DPT:
- tradycyjny cel;
- specjalny cel.
Cechy działania silników zaworów
Silniki zaworowe należą do maszyn elektrycznych specjalnego przeznaczenia. Swoją nazwę zawdzięczają zastosowaniu w nich urządzeń do prostowania prądu - zaworów. Zalety silników elektrycznych zaworów:
- szeroka zmiana prędkości obrotowej;
- wyższa wydajność ze względu na zmniejszone straty magnetyczne z powodu niskiej rezystancji magnetycznej;
- nawet przy szczytowym obciążeniu wydajność jest całkiem dobra.
Oprócz zalet mają pewne wady. Ale ich wartość nie jest wielka. Najważniejsze z nich to:
- hałaśliwość
- kierownictwo wymaga pewnych kwalifikacji personelu;
- wysoka cena.
 Ich zastosowania są różne: w produkcji ropy naftowej, w przemyśle chemicznym i na platformach wiertniczych.
Ich zastosowania są różne: w produkcji ropy naftowej, w przemyśle chemicznym i na platformach wiertniczych.
Główną różnicą między zaworem a tradycyjnym silnikiem jest konstrukcja. Zawór nie ma niektórych zwykłych części konstrukcji: kolektora i mechanizmu szczotkowego. Zamiast tego instalowany jest przełącznik (falownik), za pomocą którego sterowany jest silnik zaworu. Falownik odbiera sygnał z czujnika położenia wirnika.
Czujniki położenia wirnika mogą być transformatorowymi lub indukcyjnymi elementami bezdotykowymi. Najczęstsze są elektromotoryczne czujniki Halla. Takie urządzenie składa się z małej płytki z materiału półprzewodnikowego. Na nim znajdują się styki, do których podłączone są przewody, podłączone do źródła zasilania. Wyjścia sygnału wyjściowego są również przylutowane do odpowiednich łączy płytki. Wymagania dotyczące czujników położenia wirnika są następujące:
- zwartość;
- minimalna wartość mocy wejściowej;
- duża krotność sygnału, zarówno maksymalna, jak i minimalna;
- niezawodne działanie w każdych warunkach środowiskowych.
 Przełącznik wykonany jest na półprzewodnikach. Jego zadanie jest podobne do zadania jednostki zbierającej szczotki w konwencjonalnych silnikach i polega na zmianie kierunku prądu. Uzwojenie kotwiczne znajduje się na rdzeniu łoża, a magnes stały na wirniku. Ta konstrukcja eliminuje możliwość ześlizgnięcia się na kotwicy.
Przełącznik wykonany jest na półprzewodnikach. Jego zadanie jest podobne do zadania jednostki zbierającej szczotki w konwencjonalnych silnikach i polega na zmianie kierunku prądu. Uzwojenie kotwiczne znajduje się na rdzeniu łoża, a magnes stały na wirniku. Ta konstrukcja eliminuje możliwość ześlizgnięcia się na kotwicy.
Silnik zaworu ma prąd w fazach sinusoidalnych. Wzbudzenie może być dwojakiego rodzaju:
- elektromagnetyczny;
- magnetoelektryczny.
W przypadku wzbudzenia elektromagnetycznego uzwojenie pola znajduje się na biegunach. Jest on podłączony do sieci dzięki pierścieniom ślizgowym umieszczonym na wale wirnika. Zatem wytwarzanie pola magnetycznego odbywa się za pomocą środków elektromagnetycznych.
W przypadku wzbudzenia magnetoelektrycznego nie będzie kontaktu ślizgowego w obwodzie wzbudzenia lub w obwodzie kotwiczącym. Magnesy trwałe będą działać jak bieguny. Silniki te nazywane są silnikami bezszczotkowymi.
Właściwości urządzenia bezszczotkowego
 Bezszczotkowy silnik prądu stałego (BDTT) znacznie różni się od silnika zaworu. Jego prąd fazowy wygląda na trapezoidalny. BDTT jest ułożony prościej: modulacja szerokości impulsu zostaje zastąpiona przełączeniem 120 lub 180 stopni. Głównym zadaniem silnika bezszczotkowego jest dokładne położenie wirnika w wymaganym przedziale czasowym i duża prędkość obrotowa.
Bezszczotkowy silnik prądu stałego (BDTT) znacznie różni się od silnika zaworu. Jego prąd fazowy wygląda na trapezoidalny. BDTT jest ułożony prościej: modulacja szerokości impulsu zostaje zastąpiona przełączeniem 120 lub 180 stopni. Głównym zadaniem silnika bezszczotkowego jest dokładne położenie wirnika w wymaganym przedziale czasowym i duża prędkość obrotowa.
Konstrukcja może być dwojakiego rodzaju: z magnesami na części ruchomej (kotwica) lub nieruchoma (stojan). Urządzenia automatyki do chłodzenia wykorzystują napędy o konstrukcji zakotwiczonych magnesów. Ich charakterystyczną cechą jest szybkie osiągnięcie dużej prędkości.
 W systemach sprzętu medycznego powszechne jest umieszczanie magnesów na stojanie. Te mikromaszyny nazywane są silnikami o wysokim momencie obrotowym. Ich prędkość obrotowa nie jest tak duża, ale ze względu na brak uzwojenia wzbudzenia i obecność magnesów trwałych dobrze sobie radzą z przeciążeniem i zachowują dokładność położenia w przestrzeni.
W systemach sprzętu medycznego powszechne jest umieszczanie magnesów na stojanie. Te mikromaszyny nazywane są silnikami o wysokim momencie obrotowym. Ich prędkość obrotowa nie jest tak duża, ale ze względu na brak uzwojenia wzbudzenia i obecność magnesów trwałych dobrze sobie radzą z przeciążeniem i zachowują dokładność położenia w przestrzeni.
Sygnał do uzwojenia takich maszyn elektrycznych będzie pochodził od kierowcy, którego zadaniem jest kontrola momentu obrotowego. Aby kotwica obracała się pod określonym kątem, konieczne jest doprowadzenie napięcia do niezbędnych uzwojeń. Płynności obrotu nie można utrzymać, ale można osiągnąć wysoką prędkość obrotu.
Różnica między silnikami kolektorowymi i bezszczotkowymi polega zarówno na strukturze, jak i działaniu. Silniki kolektorów nie potrzebują sterownika, ale działanie silnika bezszczotkowego bez jego udziału jest niedopuszczalne. Zalety silników bezszczotkowych:
- zdolność do pracy w warunkach o różnych cechach środowiskowych;
- długi okres użytkowania;
- niezawodność w pracy.
 Wadą jest koszt. Jest dość wysoki ze względu na obecność przełącznika półprzewodnikowego, magnesu stałego i wrażliwych elementów w strukturze.
Wadą jest koszt. Jest dość wysoki ze względu na obecność przełącznika półprzewodnikowego, magnesu stałego i wrażliwych elementów w strukturze.
Montaż zaworu lub DPT własnymi rękami jest niewdzięcznym zadaniem. Materiały, złożoność pracy i spędzony czas będą znacznie droższe niż pieniądze wydane na zakup silnika fabrycznego. Ale niezawodność i bezpieczeństwo będą również kilkakrotnie wyższe.
Wyboru tych maszyn elektrycznych należy dokonać na podstawie charakterystyki sterowników z kanałami modulacji szerokości impulsu:
- najwyższy stres przy długotrwałym użytkowaniu;
- maksymalna prędkość obrotowa;
- dopuszczalna siła prądu;
- częstotliwość prądu (zwykłe urządzenia 7-8 kHz, bardziej zaawansowane modele - 16-32 kHz).
 Głównymi ogniwami w zarządzaniu silnikiem bezszczotkowym są czujniki położenia. Sygnał z nich jest przesyłany do kontrolera, w wyniku czego następuje przełączenie. Ale działanie tych urządzeń bez czujników jest możliwe. W tym przypadku spadek napięcia na uzwojeniu odgrywa rolę, która w pewnym momencie nie działa.
Głównymi ogniwami w zarządzaniu silnikiem bezszczotkowym są czujniki położenia. Sygnał z nich jest przesyłany do kontrolera, w wyniku czego następuje przełączenie. Ale działanie tych urządzeń bez czujników jest możliwe. W tym przypadku spadek napięcia na uzwojeniu odgrywa rolę, która w pewnym momencie nie działa.
Pod względem liczby faz wiele silników jest trójfazowych, a do ich sterowania potrzebny jest dodatkowy węzeł w urządzeniu - prostownik prądu stałego w impulsie trójfazowym. Sterowanie trójfazowym bezszczotkowym silnikiem prądu stałego również powoduje pewne trudności z powodu równoległego sterowania kilkoma parametrami. Ponieważ maszyny elektryczne urządzenia są odwracalne, silnik bezszczotkowy można podłączyć jako generator.
Struktura sprzętu typu stepping
Różne silniki prądu przemiennego specjalnego przeznaczenia to silniki krokowe. Czasami nazywane są impulsami. Dotyczą synchronicznych silników elektrycznych do specjalnych celów. Zasada ich działania polega na tym, że krokowe kroki na wyjściu są uzyskiwane z powodu impulsów napięcia na wejściu. Rodzaje silników krokowych według typu wirnika:
- podekscytowany;
- reaktywny.
Struktura urządzenia z aktywnym wirnikiem sugeruje obecność elektromagnesów lub magnesów trwałych. W silnikach z wirnikiem strumieniowym nie ma uzwojenia pola. Wirnik jest wykonany z miękkiego materiału magnetycznego.
Uzwojenie kontrolne znajduje się na części stałej - stojanie. W zależności od liczby faz może być inny, ale najczęstsze są uzwojenia trójfazowe.
Zasada działania
 Jeśli silnik krokowy na stojanie ma dwie pary biegunów z dwoma uzwojeniami sterującymi, wówczas jego obrót będzie zależeć od napięcia zasilającego uzwojenie sterujące. Po przyłożeniu sygnału do uzwojenia sterującego, które znajduje się na pierwszej parze, wirnik obróci się i zajmie pozycję wzdłuż swojej osi. Gdy na uzwojeniu drugiej pary biegunów pojawi się sygnał, wirnik będzie musiał zająć pozycję między tymi biegunami.
Jeśli silnik krokowy na stojanie ma dwie pary biegunów z dwoma uzwojeniami sterującymi, wówczas jego obrót będzie zależeć od napięcia zasilającego uzwojenie sterujące. Po przyłożeniu sygnału do uzwojenia sterującego, które znajduje się na pierwszej parze, wirnik obróci się i zajmie pozycję wzdłuż swojej osi. Gdy na uzwojeniu drugiej pary biegunów pojawi się sygnał, wirnik będzie musiał zająć pozycję między tymi biegunami.
Gdy sygnał zostanie wyłączony na uzwojeniu pierwszej pary, a pozostały sygnał na uzwojeniu kontrolnym drugiej pary biegunów, wirnik będzie obracał się wokół własnej osi. Tak więc, gdy się obraca, wydaje się podejmować kroki, dlatego nosi taką nazwę. Kroki silnika (kąt obrotu wirnika) z dwiema parami biegunów będą równe 45 stopni. System przełączania będzie czterosuwowy.
W przypadku systemu przełączania push-pull z taką samą liczbą par biegunów konieczne jest, aby sygnał zawsze dochodził tylko do jednego określonego uzwojenia sterującego danej pary biegunów. Następnie kąt obrotu wirnika zmieni się i wyniesie 90 stopni.
Aby zasada działania silnika krokowego była zrozumiała nawet dla manekinów, należy zwrócić uwagę na schemat.

Wirnik zajmie pozycję w przestrzeni w stosunku do pary biegunów, na których uzwojeniu zostanie dostarczona energia. Jeśli do uzwojeń sąsiednich biegunów zostanie dostarczona dwie moce, wirnik zajmie pozycję między nimi. Im mniejsza wartość kroku silnika, tym dokładniejsze i bardziej stabilne jego działanie.
Silnik krokowy wymaga przełącznika. Jego zadaniem jest przekształcenie impulsów kontrolnych o określonej sekwencji w impulsy prostokątne w układzie o wymaganej liczbie faz.
Przy dużym obciążeniu silnika pogorszy się dokładność obrotu wirnika. Obróci się z pewnym opóźnieniem, które jest kątem błędu statycznego. Gdy silnik krokowy pracuje na biegu jałowym, wartość kąta błędu statycznego wynosi zero.
Ponieważ prędkość procesów jest odwrotnie proporcjonalna do rezystancji uzwojeń sterujących, dlatego w celu przyspieszenia obrotu wirnika stosuje się rezystory. Są one połączone szeregowo z obwodem uzwojenia sterowania stojana. Oceń wydajność pracy na głównym wskaźniku - wartość mocy wejściowej.