
 Podczas uruchamiania silnika elektrycznego pobór prądu jest 7 razy przekraczany, co przyczynia się do przedwczesnej awarii części elektrycznych i mechanicznych silnika. Aby temu zapobiec, użyj regulacji prędkości silnika. Istnieje wiele modeli planu fabrycznego, ale aby samodzielnie zbudować takie urządzenie, musisz znać zasadę silnika elektrycznego i kontrolować prędkość wirnika.
Podczas uruchamiania silnika elektrycznego pobór prądu jest 7 razy przekraczany, co przyczynia się do przedwczesnej awarii części elektrycznych i mechanicznych silnika. Aby temu zapobiec, użyj regulacji prędkości silnika. Istnieje wiele modeli planu fabrycznego, ale aby samodzielnie zbudować takie urządzenie, musisz znać zasadę silnika elektrycznego i kontrolować prędkość wirnika.
Informacje ogólne
Silniki elektryczne prądu przemiennego są szeroko stosowane w wielu dziedzinach życia ludzkiego, a mianowicie w modelach typu asynchronicznego. Głównym celem silnika jako maszyny elektrycznej jest przekształcenie energii elektrycznej w energię mechaniczną . Tłumaczenie asynchroniczne oznacza niesynchroniczne, ponieważ prędkość wirnika różni się od częstotliwości napięcia przemiennego (U) w stojanie. Istnieją dwa rodzaje silników asynchronicznych według rodzaju mocy:
- Jednofazowy.
- Trzy fazy.
Jednofazowe są wykorzystywane do domowych potrzeb domowych, a trójfazowe są wykorzystywane w produkcji. W trójfazowych silnikach asynchronicznych (zwanych dalej TAD) stosuje się dwa typy wirników:
- zamknięte;
- faza.
Obwody zamknięte stanowią około 95% wszystkich używanych silników i mają znaczną moc (od 250 W i więcej). Rodzaj fazy różni się strukturalnie od ciśnienia krwi, ale jest rzadko stosowany w porównaniu z pierwszym. Wirnik jest stalową figurą o cylindrycznym kształcie, który jest umieszczony wewnątrz stojana, a rdzeń jest dociskany do jego powierzchni.
Klatka wiewiórkowa i wirniki fazowe
Wysokoprzewodzące pręty miedziane (do maszyn o dużej mocy) lub pręty aluminiowe (do maszyn o niższej mocy) przylutowane lub osadzone w powierzchni rdzenia i zwarte z końców dwoma pierścieniami odgrywają rolę elektromagnesów z biegunami skierowanymi w stronę stojana. Pręty uzwojenia nie mają żadnej izolacji, ponieważ napięcie w takim uzwojeniu wynosi zero.
Częściej stosowane do prętów silników o średniej mocy aluminium charakteryzuje się niską gęstością i wysoką przewodnością elektryczną.
Aby zmniejszyć wyższe harmoniczne siły elektromotorycznej (EMF) i wykluczyć pulsację pola magnetycznego, pręty wirnika mają określony sposób nachylenia względem osi obrotu w określony sposób . Jeśli stosuje się silnik elektryczny o małej mocy, wówczas rowki są zamkniętymi strukturami, które oddzielają wirnik od szczeliny w celu zwiększenia elementu indukcyjnego rezystancji.
Wirnik w postaci fazy lub typu charakteryzuje się uzwojeniem, jego końce są połączone w postaci „gwiazdy” i przymocowane do pierścieni stykowych (na wale), po których ślizgają się szczotki grafitowe. Aby wyeliminować prądy wirowe, powierzchnia uzwojeń pokryta jest warstwą tlenku. Ponadto do obwodu uzwojenia wirnika dodawany jest rezystor, który umożliwia zmianę rezystancji (R) obwodu wirnika w celu zmniejszenia prądów rozruchowych (Ip). Prądy rozruchowe niekorzystnie wpływają na elektryczne i mechaniczne części silnika elektrycznego. Zmienne rezystory używane do sterowania Ip:
- Metal lub stopień z ręczną zmianą biegów.
- Ciecz (z powodu zanurzenia na głębokość elektrod).
Szczotki z grafitu zużywają się, a niektóre modele są wyposażone w zwarcie, które podnosi szczoteczki i zamyka pierścienie po uruchomieniu silnika. PÓŁKI z wirnikiem fazowym są bardziej elastyczne pod względem regulacji Ip.
Funkcje konstrukcyjne
Silnik indukcyjny nie ma wyraźnych biegunów, w przeciwieństwie do silnika prądu stałego. Liczba biegunów zależy od liczby cewek w uzwojeniach części stałej (stojana) i metody połączenia. W maszynie asynchronicznej z 4 cewkami strumień magnetyczny przechodzi. Stojan jest wykonany z blach ze specjalnej stali (stal elektryczna), redukując prądy wirowe do zera, przy której następuje znaczne nagrzewanie uzwojenia. Prowadzi to do masywnego obwodu pośredniego.

Żelazo lub rdzeń wirnika jest dociskany bezpośrednio do wału. Między wirnikiem a stojanem jest minimalna szczelina powietrzna. Uzwojenie wirnika ma postać „klatki wiewiórkowej” i jest wykonane z prętów miedzianych lub aluminiowych.
W silnikach elektrycznych o mocy do 100 kW stosuje się aluminium, które ma niską gęstość - do wlewania się w rowki rdzenia wirnika. Ale pomimo takiego urządzenia silniki tego typu nagrzewają się. Aby rozwiązać ten problem , wentylatory są używane do wymuszonego chłodzenia, które są zamontowane na wale. Silniki te są proste i niezawodne. Jednak silniki zużywają duży prąd podczas rozruchu, 7 razy większy niż prąd nominalny. Z tego powodu mają niski moment rozruchowy, ponieważ większość energii elektrycznej jest przeznaczona na ogrzewanie uzwojeń.
Silniki elektryczne, które mają zwiększony moment rozruchowy, różnią się od zwykłej konstrukcji wirnika asynchronicznego. Wirnik wykonany jest w postaci podwójnej „klatki wiewiórki”. Modele te są podobne do fazowych rodzajów produkcji wirników. Składa się z wewnętrznych i zewnętrznych „komórek wiewiórczych”, przy czym zewnętrzna ma dużą aktywną i małą reaktywną R. Zewnętrzna ma małą aktywną i wysoką reaktywną R. Gdy prędkość wzrasta, przełączam się na komórkę wewnętrzną i działa jak wirnik klatkowy.
Zasada działania
Kiedy płynę wzdłuż uzwojenia stojana, w każdym z nich powstaje strumień magnetyczny (Ф). Te f są przesunięte o 120 stopni względem siebie. Otrzymany f obraca się, tworząc siłę elektromotoryczną (EMF) w przewodach aluminiowych lub miedzianych. W wyniku tego powstaje początkowy moment magnetyczny silnika elektrycznego i wirnik zaczyna się obracać. Proces ten nazywany jest również w niektórych źródłach poślizgiem (S), który pokazuje różnicę w częstotliwości n1 pola elektromagnetycznego rozrusznika, która staje się większa niż częstotliwość uzyskiwana przez obrót wirnika n2. Jest obliczany jako procent i ma postać: S = ((n1-n2) / n1) * 100%.
 Wartość S przy początkowym uruchomieniu silnika elektrycznego wynosi około 1, ale wraz ze wzrostem wartości n2 staje się mniejsza. W tym momencie I w wirniku maleje, dlatego EMF staje się mniejszy niż wartość nominalna. Na biegu jałowym S jest minimalne, ale wraz ze wzrostem momentu statycznego oddziaływania wirnika i stojana wartość ta osiąga wartość krytyczną. Jeśli utrzyma się następująca nierówność: S> Scr, wówczas silnik działa normalnie, jednak jeśli wartość Scr zostanie przekroczona, może się „przewrócić”. Najazd powoduje niestabilne działanie, ale z czasem znika.
Wartość S przy początkowym uruchomieniu silnika elektrycznego wynosi około 1, ale wraz ze wzrostem wartości n2 staje się mniejsza. W tym momencie I w wirniku maleje, dlatego EMF staje się mniejszy niż wartość nominalna. Na biegu jałowym S jest minimalne, ale wraz ze wzrostem momentu statycznego oddziaływania wirnika i stojana wartość ta osiąga wartość krytyczną. Jeśli utrzyma się następująca nierówność: S> Scr, wówczas silnik działa normalnie, jednak jeśli wartość Scr zostanie przekroczona, może się „przewrócić”. Najazd powoduje niestabilne działanie, ale z czasem znika.
Metody ustawiania prędkości
Aby zapobiec negatywnym skutkom podczas rozruchu, konieczne jest zmniejszenie prędkości silnika elektrycznego 220 V lub 380 V. Można to osiągnąć na kilka sposobów:
- Zmiana wartości R łańcucha wirnika.
- Zmień U w uzwojeniu stojana.
- Zmień częstotliwość U.
- Przełączanie biegunów.
Zmieniając wartość R części wirnika za pomocą dodatkowych rezystorów, zmniejsza prędkość, ale w rezultacie zmniejsza się moc. Dlatego uzyskuje się znaczną utratę energii elektrycznej. Ten rodzaj regulacji należy zastosować do wirnika fazowego.
Przy zmianie wartości U na cewce stojana możliwe jest mechaniczne lub elektryczne sterowanie prędkością wirnika. W tym przypadku używany jest kontroler U. Za pomocą tej metody można używać go tylko z charakterystyką obciążenia wentylatora (na przykład regulacja prędkości wentylatora 220v). We wszystkich innych przypadkach stosuje się trójfazowe automatyczne transformatory, które pozwalają płynnie zmieniać wartości U lub regulatory tyrystorowe.
W oparciu o wzór zależności prędkości obrotowej od częstotliwości zasilania U można regulować liczbę obrotów wirnika. Częstotliwość wirującego pola magnetycznego stojana oblicza się według wzoru: Nst = 60 * f / p (f to częstotliwość bieżącej sieci zasilającej, p to liczba par biegunów). Ta metoda zapewnia płynne kontrolowanie prędkości obrotowej części wirnika. Aby uzyskać wysoką sprawność, konieczna jest zmiana częstotliwości i U. Metoda ta jest optymalna dla silników klatkowych, ponieważ straty mocy są minimalne. Istnieją dwie metody zmiany liczby par biegunów:
- W stojanie (w rowkach) należy ułożyć 2 uzwojenia o innej liczbie p.
- Uzwojenie składa się z dwóch części połączonych równolegle lub szeregowo.
Główną wadą tej metody jest utrzymanie stopniowego charakteru zmiany częstotliwości silnika elektrycznego z klatką wiewiórkową.
Rodzaje i kryteria wyboru
Aby wybrać regulator, musisz kierować się pewnymi cechami dla konkretnego przypadku. Spośród wszystkich kryteriów możesz wybrać:
 Według rodzaju zarządzania. W przypadku silników typu kolektorowego stosuje się regulatory z wektorowym lub skalarnym układem sterowania.
Według rodzaju zarządzania. W przypadku silników typu kolektorowego stosuje się regulatory z wektorowym lub skalarnym układem sterowania.- Moc to główny parametr, na podstawie którego musisz budować.
- Zakres U.
- Według zakresu częstotliwości. Musisz wybrać model, który spełnia wymagania użytkownika dla konkretnego przypadku.
- Inne cechy, które obejmują gwarancję, wymiary, wyposażenie.
Ponadto regulator jest wybierany mocniej niż sam silnik elektryczny zgodnie ze wzorem: Preg = 1, 3 * Pmot (Preg, Pmot - odpowiednio moc regulatora i silnika). Musi być wybrany dla różnych zakresów U, ponieważ wszechstronność odgrywa ważną rolę.
Urządzenie tyrystorowe
W tym modelu, pokazanym na schemacie 1, zastosowano 2 tyrystory, połączone równolegle przeciwnie, chociaż można je zastąpić jednym triakiem.
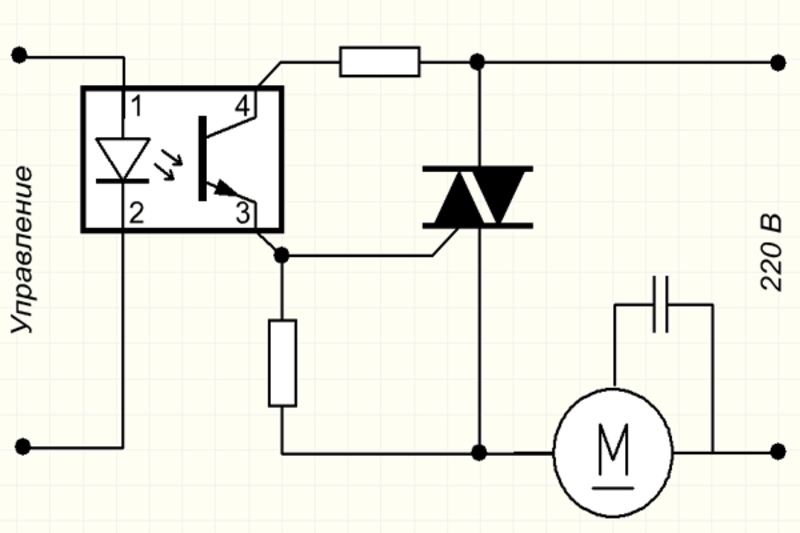
Schemat 1 - Kontrola prędkości tyrystora silnika kolektora bez utraty mocy.
Obwód ten dokonuje regulacji poprzez otwarcie lub zamknięcie tyrystorów (triak) podczas przejścia fazowego przez przewód neutralny. Do poprawnego sterowania silnikiem kolektora stosuje się następujące metody modyfikacji obwodu 1:
- Montaż ochronnych obwodów LRC składających się z kondensatorów, rezystorów i dławików.
- Dodanie pojemności wejściowej.
- Zastosowanie tyrystorów lub triaków, których prąd przekracza wartość znamionową prądu silnika w zakresie od 3..8 razy.
Ten typ regulatora ma zalety i wady. Pierwsze obejmują niski koszt, niską wagę i rozmiar. Drugi powinien zawierać następujące elementy:
- zastosowanie do silników o niskiej mocy;
- jest hałas i szarpnięcie silnika;
- podczas korzystania z obwodu triaków, stała U uderza silnik.
Ten typ kontrolera jest instalowany w wentylatorach, klimatyzatorach, pralkach i wiertarkach elektrycznych. Pomimo niedociągnięć wykonuje swoje funkcje doskonale.
Typ tranzystora
Inną nazwą regulatora typu tranzystorowego jest autotransformator lub kontroler PWM (obwód 2). Zmienia wartość U zgodnie z zasadą modulacji szerokości impulsu (PWM) z wykorzystaniem stopnia wyjściowego, który wykorzystuje tranzystory takie jak IGBT.
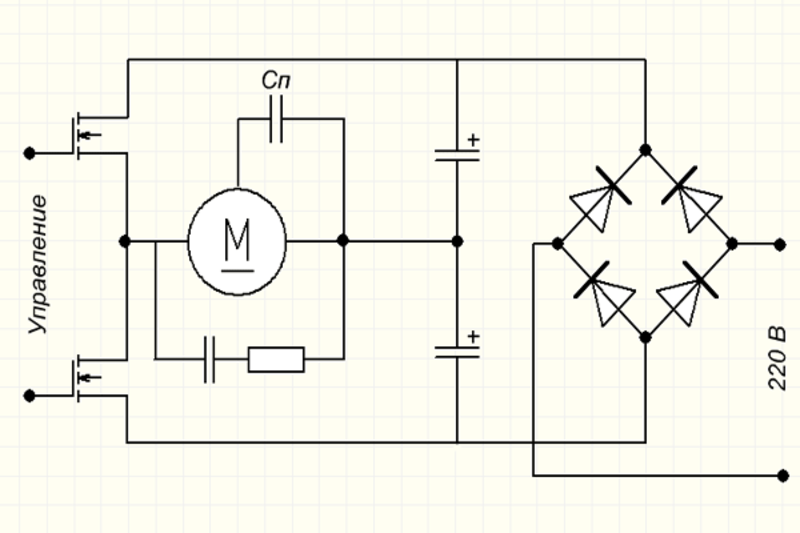
Schemat 2 - Tranzystorowy regulator prędkości PWM.
Przełączanie tranzystorów odbywa się z dużą częstotliwością, dzięki czemu można zmienić szerokość impulsu. Dlatego wartość U także się zmieni. Im dłuższy puls i krótsza pauza, tym wyższa wartość U i odwrotnie. Pozytywne aspekty korzystania z tej odmiany są następujące:
- Niska waga przy małych wymiarach.
- Całkiem niski koszt.
- Przy niskich obrotach brak hałasu.
- Kontrola dzięki niskim wartościom U (0..12 V).
Główną wadą aplikacji jest to, że odległość do silnika elektrycznego nie powinna przekraczać 4 metrów.
Kontrola częstotliwości
 Szeroko stosowane jest sterowanie prędkością różnych typów silników ze względu na częstotliwość. Przetwarzanie częstotliwości zajmuje wiodącą pozycję na rynku sprzedaży urządzeń do kontroli prędkości i wdrażania łagodnego rozruchu. Ze względu na swoją wszechstronność można wpływać na moc, wydajność i prędkość dowolnego urządzenia z silnikiem elektrycznym. Urządzenia te są stosowane w silnikach jednofazowych i trójfazowych. Stosowane są następujące typy przetwornic częstotliwości:
Szeroko stosowane jest sterowanie prędkością różnych typów silników ze względu na częstotliwość. Przetwarzanie częstotliwości zajmuje wiodącą pozycję na rynku sprzedaży urządzeń do kontroli prędkości i wdrażania łagodnego rozruchu. Ze względu na swoją wszechstronność można wpływać na moc, wydajność i prędkość dowolnego urządzenia z silnikiem elektrycznym. Urządzenia te są stosowane w silnikach jednofazowych i trójfazowych. Stosowane są następujące typy przetwornic częstotliwości:
- Specjalistyczny jednofazowy.
- Trójfazowy bez kondensatora.
Aby kontrolować prędkość, stosuje się kondensator, dołączony do uzwojenia silnika jednofazowego (obwód 3). Ta przetwornica częstotliwości (IF) ma pojemność R, która zależy od częstotliwości przepływającego prądu przemiennego. Stopień wyjściowy takiego falownika jest wykonywany na tranzystorach IGBT.
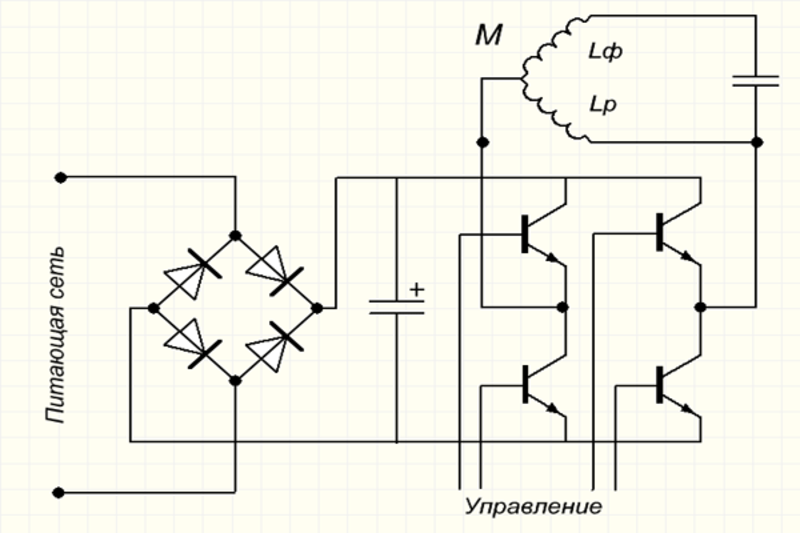
Schemat 3 - Regulator prędkości częstotliwości.
Specjalistyczny falownik ma swoje zalety i wady. Korzyści są następujące:
- Zarządzanie ciśnieniem krwi bez interwencji człowieka.
- Stabilność
- Dodatkowe funkcje
Możliwe jest kontrolowanie pracy silnika elektrycznego w określonych warunkach, a także ochrona przed przeciążeniami i prądami zwarciowymi. Ponadto istnieje możliwość rozszerzenia funkcjonalności poprzez podłączenie czujników cyfrowych, monitorowanie parametrów pracy i użycie regulatora PID. Wady obejmują ograniczenia kontroli częstotliwości i dość wysoki koszt.
W przypadku trójfazowych BP stosowane są również urządzenia do kontroli częstotliwości (Schemat 4). Regulator ma na wyjściu trzy fazy do podłączenia silnika elektrycznego.
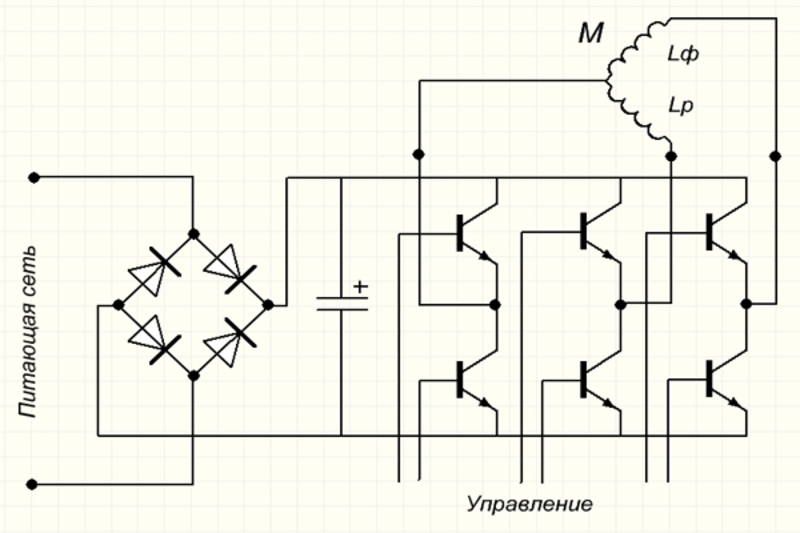
Schemat 4 - JEŻELI dla silnika trójfazowego.
Ta opcja ma również swoje mocne i słabe strony. Pierwsze obejmują: niski koszt, dobór mocy, szeroki zakres regulacji częstotliwości, a także wszystkie zalety jednofazowych przetwornic częstotliwości. Spośród wszystkich negatywnych stron można wyróżnić główne: wstępny wybór i ogrzewanie podczas rozruchu.
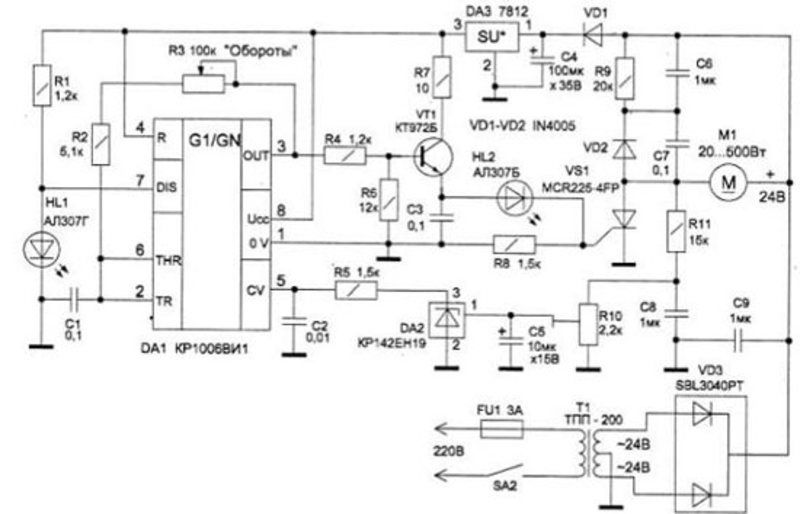
Wykonywanie majsterkowania
Jeśli nie ma takiej możliwości, a także chęć nabycia regulatora typu fabrycznego, możesz go zmontować własnymi rękami. Chociaż regulatory takie jak „tda1085” sprawdziły się bardzo dobrze. Aby to zrobić, musisz zapoznać się z teorią i zacząć ćwiczyć. Schematy projektowania triaków są bardzo popularne, w szczególności regulator prędkości silnika asynchronicznego 220v (schemat 5). Ułatw sobie. Idzie do triaka VT138, dobrze przystosowanego do tych celów.
Schemat 5 - Prosty kontroler prędkości na triaku.
Regulator ten można również wykorzystać do regulacji prędkości silnika prądu stałego 12 woltów, ponieważ jest on dość prosty i wszechstronny. Zwoje są regulowane ze względu na zmianę parametrów P1, która określa fazę przychodzącego sygnału, która otwiera przejście triaka.
Zasada działania jest prosta. Po uruchomieniu silnik zwalnia, indukcyjność zmienia się na mniejszą stronę i przyczynia się do wzrostu U w obwodzie „R2-> P1-> C2”. Po rozładowaniu C2 triak otwiera się na jakiś czas.
Jest inny schemat. Działa w nieco inny sposób: zapewniając odwrotny rodzaj energii, który jest optymalnie opłacalny. W obwodzie znajduje się dość silny tyrystor.
Schemat 6 - Urządzenie tyrystorowy regulator.
Obwód składa się z generatora sygnału sterującego, wzmacniacza, tyrystora i części obwodu, która działa jako stabilizator obrotu wirnika.
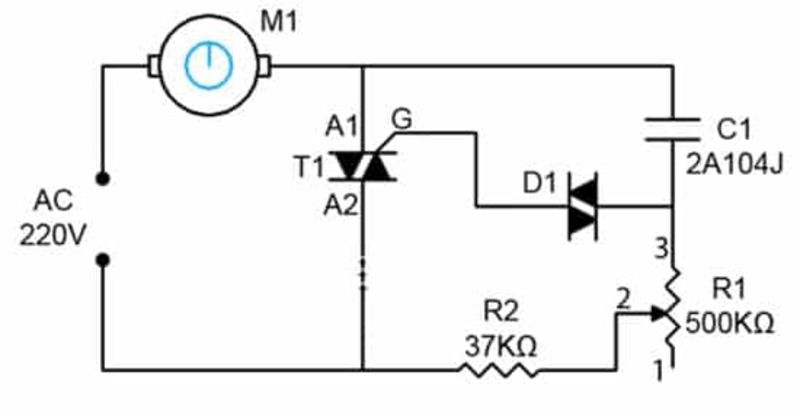
Najbardziej uniwersalnym obwodem jest regulator triaka i dinistora (obwód 7). Potrafi płynnie zmniejszyć prędkość obrotową wału, ustawić silnik wsteczny (zmienić kierunek obrotów) i zmniejszyć prąd rozruchowy.
Zasada działania obwodu:
- C1 jest obciążany do przebicia U dinistora D1 do R2.
- D1 po przebiciu otwiera przejście triaka D2, który jest odpowiedzialny za kontrolowanie obciążenia.
Napięcie obciążenia jest wprost proporcjonalne do składowej częstotliwości podczas otwierania D2, w zależności od R2. Obwód jest stosowany w odkurzaczach. Zawiera uniwersalne sterowanie elektroniczne, a także możliwość łatwego podłączenia zasilacza 380 V. Wszystkie szczegóły powinny być umieszczone na płytce drukowanej wykonanej w technologii laserowo-żelaznej (LUT). Szczegóły tej technologii wytwarzania płytek drukowanych można znaleźć w Internecie.
Tak więc, wybierając sterownik prędkości do silnika elektrycznego, można kupić fabrycznie lub zrobić to sam. Wykonanie domowej roboty regulatora jest dość proste, ponieważ jeśli rozumiesz zasadę urządzenia, możesz go łatwo zmontować. Ponadto podczas instalowania części i pracy z energią elektryczną należy przestrzegać zasad bezpieczeństwa.