
- Różnica i odmiany silników krokowych
- Projekt i zasada działania
- Metody kontroli fazy
- Metody sterowania silnikiem krokowym
- Tryb napędu Microstepping
 Silnik krokowy jest urządzeniem elektromechanicznym, które przekształca sygnały elektryczne w dyskretne przesunięcia kątowe wału. Zastosowanie silników krokowych pozwala korpusom roboczym maszyn wykonywać ściśle odmierzone ruchy z ustaleniem ich położenia na końcu ruchu.
Silnik krokowy jest urządzeniem elektromechanicznym, które przekształca sygnały elektryczne w dyskretne przesunięcia kątowe wału. Zastosowanie silników krokowych pozwala korpusom roboczym maszyn wykonywać ściśle odmierzone ruchy z ustaleniem ich położenia na końcu ruchu.
Są stosowane w maszynach CNC, robotyce, gdzie wymagane są dyskretne ruchy, ustalanie pozycji i niska prędkość.
Różnica i odmiany silników krokowych
Zgodnie z zasadą działania są one bliższe silnikom prądu stałego. Konstrukcja silników elektrycznych jest ciągle doskonalona, aby zmniejszyć koszty pracy przy produkcji, zwiększyć wydajność i zwiększyć liczbę obrotów. W porównaniu z silnikiem prądu stałego nie mają szczotek, kolektora i uzwojenia o mniejszej liczbie obrotów.
Wśród pierwszych silników powstał miniaturowy silnik do zegarka, nazwany na cześć francuskiego inżyniera Mariusa Loveta. Stojan jest odłączony na krawędziach lub w obszarze wirnika ma małe zwężenia. Wirnik o średnicy 1, 5 mm, magnetyczny na bazie kobaltu. Jedno uzwojenie w jednym rzędzie o mocy 1, 5 wolta. Kąt obrotu wynosi 90 stopni.
Silnik lawety jest również stosowany w medycynie do pompowania różnych cieczy, a także jest często stosowany w mikserach i mikserach.
Ostatnio opracowano silniki piezoelektryczne wykorzystujące efekt piezomagnetyczny i wykorzystujące materiały ferromagnetyczne w konstrukcji. Ulepszono silniki liniowe, w których wał nie obraca się, ale wykonuje ruchy liniowe. W przypadku precyzyjnych urządzeń mechanicznych rosyjscy producenci produkują silniki z oznaczeniem serii:
 DS.
DS.- DShR.
- DShG.
- DSL.
- SHD.
- DSE
Takie przedsiębiorstwa jak ATOM, ZETEK, firma Elektroprivod, Stepmotor, Vekson, NPO RIF, Saratov el. mechaniczne, VNIIEM Corporation, ZAO Uralelectromash, ARC Energoservice. Firmy zagraniczne, takie jak Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron i inne, zajmują się produkcją napędów silnikowych FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD. Zakres produkowanych napędów silnikowych jest zróżnicowany: pod względem wielkości, mocy, z wbudowaną skrzynią biegów i płytą sterowania.
Projekt i zasada działania
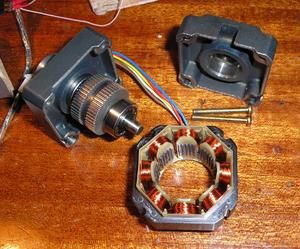
 Silnik krokowy składa się ze stojana i wirującego wirnika. Rdzeń stojana jest wykonany w postaci zestawu blach ze stali elektrycznej (wytłoczony). Zmniejsza to prądy wirowe, a zatem i ogrzewanie. Stojan jest obwodowo podzielony na podłużne rowki 4.6.8. Dotyczy to i nie tylko. Na występach między rowkami znajdują się uzwojenia w postaci cewek. Liczba gniazd odpowiada liczbie biegunów silnika. Im więcej biegunów, tym mniejszy kąt obrotu wirnika, to znaczy skok.
Silnik krokowy składa się ze stojana i wirującego wirnika. Rdzeń stojana jest wykonany w postaci zestawu blach ze stali elektrycznej (wytłoczony). Zmniejsza to prądy wirowe, a zatem i ogrzewanie. Stojan jest obwodowo podzielony na podłużne rowki 4.6.8. Dotyczy to i nie tylko. Na występach między rowkami znajdują się uzwojenia w postaci cewek. Liczba gniazd odpowiada liczbie biegunów silnika. Im więcej biegunów, tym mniejszy kąt obrotu wirnika, to znaczy skok.
Wirnik składa się z jednego lub dwóch magnesów stałych, z końcami, których metalowe płytki są przymocowane zębami. W tym przypadku plusy S i N magnesu stałego są podzielone na n biegunów, co odpowiada liczbie zębów. Wpływa również na wielkość kroku obrotu. Zgodnie z konstrukcją ШД produkowane są trzy typy w zależności od konstrukcji wirnika:
- reaktywny;
- wirnik z magnesem trwałym;
- hybrydowy.
 Reaktywne - wirnik wykonany jest z materiału ferromagnetycznego z podłużnymi rowkami, biegunami. Jest rzadko używany, tylko do prostych zadań. Głównie dlatego, że nie ma on momentu blokującego. Hybrydowy - wirnik składa się z dwóch połówek materiału ferromagnetycznego, z podłużnymi rowkami i między nimi znajduje się magnes stały. Rowki połówek względem siebie są przesunięte o mały kąt, aby zmniejszyć skok. Najczęściej są używane.
Reaktywne - wirnik wykonany jest z materiału ferromagnetycznego z podłużnymi rowkami, biegunami. Jest rzadko używany, tylko do prostych zadań. Głównie dlatego, że nie ma on momentu blokującego. Hybrydowy - wirnik składa się z dwóch połówek materiału ferromagnetycznego, z podłużnymi rowkami i między nimi znajduje się magnes stały. Rowki połówek względem siebie są przesunięte o mały kąt, aby zmniejszyć skok. Najczęściej są używane.
Po przyłożeniu napięcia impulsu do uzwojenia stojana generowane jest pole elektromagnetyczne. Interakcja z najbliższym biegunem magnesu stałego tworzy moment obrotowy. Wał silnika obraca się o określony kąt. Kąt obrotu zależy głównie od liczby biegunów wirnika.
Taki silnik nazywa się stepper. Ze względu na swój niewielki rozmiar, seria WD 422 WD jest stosowana w drukarkach igłowych.
Metody kontroli fazy
Sterowanie zależy głównie od liczby biegunów i konfiguracji uzwojeń stojana. SD są produkowane głównie z następującymi uzwojeniami:
- Dwa uzwojenia z 4 pinami.
- Dwa uzwojenia z 6 żyłami ze średnim zaciskiem.
- Cztery uzwojenia - 8 wniosków.
 Możesz kontrolować dwie metody, użyć napięcia jednobiegunowego - unipolarnego lub bipolarnego - bipolarnego. Jednobiegunowy silnik krokowy ma 4 bieguny i 2 uzwojenia. W czterofazowym każde uzwojenie jest podzielone na pół i znajduje się na przeciwnych biegunach. Obrót odbywa się poprzez naprzemienne przyłożenie napięcia do uzwojenia. Z 6 odprowadzeniami lub 5, także 2 uzwojeniami, ale z kurkiem od środka. Zazwyczaj środkowe przewody cewki są połączone razem z przewodem ujemnym, a biegun dodatni za pomocą zarządzanych kluczy jest doprowadzany do uzwojeń.
Możesz kontrolować dwie metody, użyć napięcia jednobiegunowego - unipolarnego lub bipolarnego - bipolarnego. Jednobiegunowy silnik krokowy ma 4 bieguny i 2 uzwojenia. W czterofazowym każde uzwojenie jest podzielone na pół i znajduje się na przeciwnych biegunach. Obrót odbywa się poprzez naprzemienne przyłożenie napięcia do uzwojenia. Z 6 odprowadzeniami lub 5, także 2 uzwojeniami, ale z kurkiem od środka. Zazwyczaj środkowe przewody cewki są połączone razem z przewodem ujemnym, a biegun dodatni za pomocą zarządzanych kluczy jest doprowadzany do uzwojeń.
Silniki dwubiegunowe mają 4 uzwojenia, po 2 na każdą fazę. Kontrola ma miejsce, gdy zmienia się polaryzacja uzwojenia. Dzięki tej kontroli schemat połączeń silnika krokowego jest skomplikowany, ale moment obrotowy jest uzyskiwany bardziej. Główne cechy to napięcie zasilania, pobierany prąd fazowy, stopień, moc i rozmiar kołnierza. Siedzenia są znormalizowane i oznaczone jako, na przykład, Nema 23. Odpowiada to odległości między otworami do montażu 57 mm.
Metody sterowania silnikiem krokowym
 Zastosowanie napędów silnikowych w maszynach CNC konkuruje tylko z serwonapędami, na przykład w maszynach erozyjnych lub drukarkach, nawet przewyższają je możliwościami technicznymi, kosztami i prostymi schematami sterowania. Zarządzanie może odbywać się na cyfrowych mikroukładach, specjalistycznych - A3977, na programowanym PIC16, za pomocą kluczy lub sterowników SMSD 1.5.
Zastosowanie napędów silnikowych w maszynach CNC konkuruje tylko z serwonapędami, na przykład w maszynach erozyjnych lub drukarkach, nawet przewyższają je możliwościami technicznymi, kosztami i prostymi schematami sterowania. Zarządzanie może odbywać się na cyfrowych mikroukładach, specjalistycznych - A3977, na programowanym PIC16, za pomocą kluczy lub sterowników SMSD 1.5.
Większość sterowników jest kontrolowanych przez komputer przez porty RS-232, USB i LPT. Generują sygnały sterujące: krok, kierunek, rozdzielczość i zapewniają krok dzielony przez ½ na 1/32 i współpracują z programami: MACH3, KCam, DeskCNC, Turbocnc i innymi. Podłącz silnik do sterownika za pomocą kabla zgodnie z opisem. Po przestudiowaniu pracy programu rozpoczęcie pracy nie jest trudne. Do włączenia stosuje się napięcie od 5 woltów do 48 woltów. Wyjątek stanowią silniki o napięciu 220/110 V.
Tryb napędu Microstepping
Główny czas działania silnika krokowego jest w trybie krok po kroku lub w połowie kroku, a przy uruchamianiu i zatrzymywaniu zaleca się stosowanie trybu mikro-krokowego w celu dokładnego zamocowania. Tryb krok po kroku zależy od projektu i kontroli impulsu. Podczas mikrostopu do uzwojenia przykładane są sinusoidalne napięcia o pożądanym przesunięciu fazowym.
Wirnik jest ustalony w pewnym stosunku faz prądów w uzwojeniach. Obliczanie punktu równowagi za pomocą wzoru x = S * pi / 2 * arctan a / b gdzie:
- a jest momentem stworzonym przez pierwszą fazę, a b jest drugą fazą;
- x jest punktem równowagi wirnika lub mikrokroka w radianach;
- S jest kątem kroku.
 Konieczne jest również wzięcie pod uwagę maksymalnej częstotliwości sygnału sterującego, przy której nie występuje utrata lub dodanie dodatkowego stopnia podczas pracy. Jest to główny wskaźnik trybu przejściowego silnika krokowego i jest wskazany w charakterystyce jako częstotliwość reakcji silnika.
Konieczne jest również wzięcie pod uwagę maksymalnej częstotliwości sygnału sterującego, przy której nie występuje utrata lub dodanie dodatkowego stopnia podczas pracy. Jest to główny wskaźnik trybu przejściowego silnika krokowego i jest wskazany w charakterystyce jako częstotliwość reakcji silnika.
Podczas pracy konieczne jest monitorowanie czystości wokół napędu i zapobieganie przedostawaniu się wiórów metalowych, możliwa jest awaria napędu silnikowego. Znajdź sposób na ochronę dysku. Naprawa jest podobna do naprawy silnika komutatora, wymaga dokładności.
Po demontażu zdejmij stojan sprężonym powietrzem i wytrzyj wirnik szmatką. Sprawdź bicie łożyska.