
- Co to jest konwersja częstotliwości
- Wybór silnika
- Uzyskanie pola magnetycznego
- Przemienniki częstotliwości
- Zalety korzystania z przetwornic częstotliwości
- Regulacja wektora i częstotliwości
- Implementacja techniczna falownika
- Zasada regulacji prędkości
 Dość często wiele szynek lub tylko ludzie biznesu muszą kontrolować prędkość silnika trójfazowego. Nie ma sensu używać do tego banalnego regulatora mocy, ponieważ jest on zbudowany na zasadzie zmiany napięcia, a jednak, jak wiadomo, silniki prądu przemiennego nie chcą być regulowane w ten sposób, nawet jednofazowe.
Dość często wiele szynek lub tylko ludzie biznesu muszą kontrolować prędkość silnika trójfazowego. Nie ma sensu używać do tego banalnego regulatora mocy, ponieważ jest on zbudowany na zasadzie zmiany napięcia, a jednak, jak wiadomo, silniki prądu przemiennego nie chcą być regulowane w ten sposób, nawet jednofazowe.
Obroty oczywiście się zmienią, ale tylko w niewielkim i prawie niezauważalnym limicie, po którym, gdy zostanie osiągnięty dolny próg i gdy 220 V zostanie zasilone przy 150 V, obroty całkowicie się zatrzymają. Jeśli wałek potrzebuje również normalnego momentu, na przykład podczas regulacji prędkości przenośnika lub listwy, w zależności od tego, do czego jest podłączony, odpowiedni jest tylko przetwornica częstotliwości.
Co to jest konwersja częstotliwości
 Zgodnie z koncepcją konwersji częstotliwości, a następnie przetwornicy częstotliwości, powinniśmy zrozumieć cały system, który coś robi. Mianowicie przekształca częstotliwość uzwojenia zasilania silnika asynchronicznego napięcia. Oznacza to, że zwracamy uwagę na fakt, że nie zmienia się tutaj napięcie, ale jego częstotliwość. W tym trybie sterowania moment na wale silnika jest zachowywany, gdy zmienia się jego prędkość obrotowa.
Zgodnie z koncepcją konwersji częstotliwości, a następnie przetwornicy częstotliwości, powinniśmy zrozumieć cały system, który coś robi. Mianowicie przekształca częstotliwość uzwojenia zasilania silnika asynchronicznego napięcia. Oznacza to, że zwracamy uwagę na fakt, że nie zmienia się tutaj napięcie, ale jego częstotliwość. W tym trybie sterowania moment na wale silnika jest zachowywany, gdy zmienia się jego prędkość obrotowa.
Ale aby stworzyć przetwornicę częstotliwości własnymi rękami, musisz pamiętać o konstrukcji i możliwych charakterystykach działania silników asynchronicznych. Ponadto, decydując się na konkretną produkcję takiego urządzenia, pierwszym krokiem jest znalezienie silnika odpowiedniego dla parametrów, który poradziłby sobie z pracą przypisaną mu jako część gotowego kompleksu.
Wybór silnika
Aby zaprojektować domowej roboty chastotnik, należy najpierw pamiętać, czym jest silnik asynchroniczny i jak działa. Silnik niesynchroniczny lub DPT to urządzenie mechaniczne składające się ze stojana z uzwojeniami pola i wirnika. Drugim składnikiem może być:
 zwarte, to znaczy, że środkowe przewodniki są połączone na końcach pierścieniami, a one same są grube i krótkie, dlatego konstrukcja nazywa się „kołem wiewiórki”;
zwarte, to znaczy, że środkowe przewodniki są połączone na końcach pierścieniami, a one same są grube i krótkie, dlatego konstrukcja nazywa się „kołem wiewiórki”;- faza, wirnik ma kilka uzwojeń, które są podłączone do pierścieni ślizgowych używanych do usuwania napięcia w trybie generatora.
Zasada działania silnika jest bardzo prosta i polega na wpływie wirującego pola magnetycznego wytworzonego w stojanie na wirnik klatkowy, w którym występuje emf. Z tego powodu w wirniku zaczyna płynąć prąd, co prowadzi do powstawania sił oddziałujących z polem magnetycznym stojana. W tym przypadku prędkość wirnika i pole magnetyczne są nierówne, dlatego nazwa jest silnikiem asynchronicznym.
Uzasadnione jest założenie, że jeśli zmienisz częstotliwość napięcia zasilającego stojan, wówczas zmieni się prędkość wirnika. W rzeczywistości wszystkie poważne firmy używają właśnie przetwornic częstotliwości do sterowania takimi silnikami. Projektując obwód przetwornicy częstotliwości dla silnika elektrycznego własnymi rękami, powinieneś wziąć pod uwagę rodzaj silnika i wszystkie jego cechy. W szczególności moc, liczba biegunów i maksymalna prędkość obrotowa. Gotowe programy można pobrać z magazynu internetowego „Radiocot” . Jest ich dużo .
Uzyskanie pola magnetycznego
 Aby uzyskać trójfazowe wirujące pole magnetyczne, konieczne jest przepuszczenie prądu przez cewkę na stojanie z wymaganą częstotliwością, co zostanie określone wzorem: iA = I m sinωt. W wyniku działania tego prądu MDS FA zaczyna działać wzdłuż osi obrotu. Ponieważ zwoje w stojanie występują naprzemiennie w fazach, tętnienie będzie miało ten sam charakter, tworząc wspólną siłę pulsującą F, która jest stała. Jest on definiowany jako pierwiastek kwadratowych sił w dwóch zwojach przesuniętych względem siebie pod kątem 90ºС.
Aby uzyskać trójfazowe wirujące pole magnetyczne, konieczne jest przepuszczenie prądu przez cewkę na stojanie z wymaganą częstotliwością, co zostanie określone wzorem: iA = I m sinωt. W wyniku działania tego prądu MDS FA zaczyna działać wzdłuż osi obrotu. Ponieważ zwoje w stojanie występują naprzemiennie w fazach, tętnienie będzie miało ten sam charakter, tworząc wspólną siłę pulsującą F, która jest stała. Jest on definiowany jako pierwiastek kwadratowych sił w dwóch zwojach przesuniętych względem siebie pod kątem 90ºС.
W rezultacie powstaje obrót pola z prędkością kątową, wyrażoną wzorem dla każdego zwoju osobno: ω = 2π f 1. Ale aby obliczyć prędkość pola w całej maszynie, należy wziąć pod uwagę całkowitą liczbę par biegunów wyrażoną symbolem p. A wtedy prędkość pola będzie równa: ω 0 = 2π f 1 / p. W związku z tym możliwe jest obliczenie prędkości wyrażonej w obr / min: n0 = 60 f 1 / p.
Oprócz tych danych należy pamiętać, że właściwości będą się różnić od trybu pracy na biegu jałowym, to znaczy przy ω = ω 0 i przy obciążeniu, gdy ω ≠ ω 0. Przydatne byłoby również przypomnienie, że pod obciążeniem istnieje coś takiego jak poślizg, który pojawia się z powodu opóźnienia ω od ω 0. I jest wyrażony jako: s = (ω 0 - ω) / ω 0. Sugeruje to, że przy budowie ACS ze wzrostem tej wartości konieczna jest automatyczna zmiana częstotliwości napięcia w uzwojeniach w celu zapewnienia stabilności prędkości przy różnych obciążeniach .
Przemienniki częstotliwości
Wszystkie przemysłowe chastotniki zapewniają różne zasady kontrolowania prędkości i momentu na wale silników indukcyjnych poprzez zmianę nie tylko częstotliwości, ale także przesunięcia fazowego, czasu narastania impulsów sterujących, hamowania dynamicznego i wielu innych parametrów. Jednocześnie wszystko to odbywa się automatycznie, bez dodatkowego udziału z zewnątrz. Dlatego obwód przemysłowy przetwornicy częstotliwości dla silnika trójfazowego składa się z następujących elementów:
 Centralny procesor, który działa jak shaper impulsów master i kontrolnych.
Centralny procesor, który działa jak shaper impulsów master i kontrolnych.- Jednostka zasilająca: prostownik i jednocześnie jednostka sterująca, zbudowana na modułach IGBT.
- Jednostka wejścia i wyjścia danych lub po prostu interfejs do interakcji użytkownika.
- Konwerter magistrali do pracy z systemem sterowania programem.
Silnik trójfazowy może być wyposażony w czujnik, wówczas wymagane jest sprzężenie zwrotne. Czujnik może być optyczny, indukcyjny lub magnetyczny. W wysokoobrotowych silnikach prędkość jest obliczana programowo na podstawie charakterystyk.
Zalety korzystania z przetwornic częstotliwości
Nie bez powodu ludzie zaczęli aktywnie używać przetwornic częstotliwości we wszystkich typach przedsiębiorstw, a nawet w życiu codziennym, ponieważ są one znacznie bardziej ekonomiczne niż silniki kolektorów i mogą pracować w warunkach, w których silnik szczotki szybko się psuje. Oprócz tego zastosowanie przetwornicy częstotliwości umożliwiło zastąpienie wariatorów mechanicznych układami napędowymi, co znacznie uprościło konstrukcję urządzenia. Biorąc pod uwagę, że DPT praktycznie nie wymaga naprawy podczas pracy, użycie falownika jest po prostu idealnym rozwiązaniem.
Należy jednak rozumieć, że istnieją granice prawne, w których zmieni się również zasada sterowania silnikiem indukcyjnym:
- Podczas regulacji prędkości w zakresie 16: 1 lub mniejszym konieczne jest użycie falownika działającego na charakterystykę woltowo-częstotliwościową.
- Do regulacji w zakresie 50: 1 należy zastosować bezczujnikowe sterowanie wektorowe.
- W dużych zakresach należy stosować sprzężenie zwrotne za pomocą czujników lub regulatora PID zintegrowanego z falownikiem.
W każdym razie, gdy silnik ma być używany w trudnych warunkach pracy, co zwykle się zdarza, lepiej jest zastosować sterowanie wektorowe.
Regulacja wektora i częstotliwości
 Aby zbudować wysokiej jakości samobieżny system pistoletu z asynchronicznym sterowaniem silnikiem, konieczne jest dobre zrozumienie pojęć, a mianowicie regulacja wektorowa lub regulacja częstotliwości.
Aby zbudować wysokiej jakości samobieżny system pistoletu z asynchronicznym sterowaniem silnikiem, konieczne jest dobre zrozumienie pojęć, a mianowicie regulacja wektorowa lub regulacja częstotliwości.
Zasada częstotliwości jest stosowana w systemach, w których nie ma potrzeby ścisłego kontrolowania prędkości, a przepływ wytwarzany przez silnik bez znacznego obciążenia jest ważny. Ale gdy wymagane jest zapewnienie wysokiego momentu obrotowego i dobrej przyczepności od pierwszego zakrętu, należy zastosować sterowanie wektorowe.
Wektorowe samobieżne pistolety są również stosowane w systemach śledzenia o niskich prędkościach posuwu. Na przykład w maszynach do podawania stołu lub wspornikach wrzeciona. W tym przypadku konieczne jest nie tylko pokonanie bezwładności łoża, ale także zapewnienie niezbędnego wysiłku podczas obróbki części.
Projektując chastotnik do trójfazowego silnika elektrycznego własnymi rękami, należy wziąć pod uwagę rodzaj obciążenia, ponieważ charakterystyka sterowania przełącznikami mocy będzie również zależeć od tego, aby osiągnąć wymaganą moc przy minimalnych stratach.
Implementacja techniczna falownika
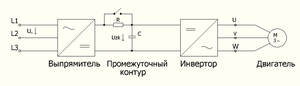
Tak więc dochodzimy do konstrukcji schematu blokowego silnika indukcyjnego. I powinieneś natychmiast zapewnić, że prawie wszyscy producenci tego typu przetworników używają tego samego bloku obwodu, którego możesz użyć do zaprojektowania własnego przetwornika. I składa się z następujących elementów:
 Niekontrolowany prostownik trójfazowy 380 V lub jednofazowy napięcie sieciowe 220 V.
Niekontrolowany prostownik trójfazowy 380 V lub jednofazowy napięcie sieciowe 220 V.- Szyna DC z wbudowanym filtrem LC - składającym się z zestawu kondensatorów, które zapewniają jej stabilne ładowanie i eliminują tętnienia podczas skoków napięcia w sieci.
- Falownik, który przekształca stałe napięcie pośrednie w napięcie przemienne o pożądanej częstotliwości. Jest wyposażony w PWM do kontroli jakości.
- Asynchroniczny silnik elektryczny, który jest sterowany.
Należy powiedzieć, że producenci od dawna dążyli do stworzenia idealnej PWM, dzięki której możliwe byłoby stabilne sterowanie silnikiem. I dopiero wraz z pojawieniem się modułów IGBT stało się to możliwe. Dlatego, aby zbudować własny konwerter, zaleca się stosowanie kluczy o napięciu co najmniej 1200 V, biorąc pod uwagę możliwe tętnienia sieci i dobry margines prądu. Na rynku można znaleźć tranzystory i moduły do 100 lub więcej A.
Uproszczony obwód konwertera bloków będzie wyglądał następująco:
 Prostownik, jego połączenie odbywa się zgodnie z zasadą jedno lub dwufazowego obwodu mostkowego. Przeznaczony jest do konwersji napięcia przemiennego na stały, odpowiedni do dalszej konwersji częstotliwości od 0 Hz do częstotliwości sieciowej. Obwód pośredni warunkowo składa się z dwóch bloków:
Prostownik, jego połączenie odbywa się zgodnie z zasadą jedno lub dwufazowego obwodu mostkowego. Przeznaczony jest do konwersji napięcia przemiennego na stały, odpowiedni do dalszej konwersji częstotliwości od 0 Hz do częstotliwości sieciowej. Obwód pośredni warunkowo składa się z dwóch bloków:- Urządzenia do płynnego ładowania magistrali, aby nie uszkodzić linii przewodzących prąd podczas ładowania kondensatorów. Nazywa się to opornością na stateczniki.
- Blok kondensatorów to filtr.
Obliczone napięcie obwodu pośredniego jest √2 razy większe niż U N. Po osiągnięciu wymaganego stałego poziomu napięcia na magistrali rezystor jest mostkowany przez parę styków. Ostatnim blokiem w obwodzie jest falownik. Jest to ostatni sterownik impulsów wyjściowych, które są następnie podawane do silnika, zapewniając jego obrót przy danej prędkości.
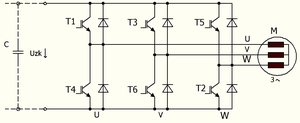
Uogólnioną strukturę modułu mocy pokazano na poniższym rysunku:
 Do budowy falownika stosuje się tranzystory wysokoprądowe pracujące w trybie czysto przełączającym. W trakcie tego procesu są bardzo gorące, dlatego są instalowane na dużych grzejnikach o dużej powierzchni rozpraszania ciepła.
Do budowy falownika stosuje się tranzystory wysokoprądowe pracujące w trybie czysto przełączającym. W trakcie tego procesu są bardzo gorące, dlatego są instalowane na dużych grzejnikach o dużej powierzchni rozpraszania ciepła.
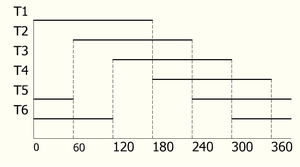
Aby zaprojektować obwód sterujący falownika, musisz wyraźnie wyobrazić sobie wadę kluczy. Aby to zrobić, zwróć uwagę na zdjęcie poniżej:
Pokazuje przedziały czasowe dla każdego klucza zainstalowanego w tej kolejności, jak pokazano na poprzednim rysunku. Oznacza to, że w fazie U tranzystory T1 i T4 działają, w fazie V - T3 i T6 i tak dalej. Dla każdego z uzwojeń silnika para pali IGBT. Konstruując falownik do silników małej mocy o niskim prądzie, można użyć prostych tranzystorów bipolarnych lub polowych.
Wykres czasowy pokazuje, że w pierwszym momencie tranzystory T1, T5 i T6 otwierają się. Ponadto tranzystor T1 i T6 są nadal otwarte, podczas gdy T5 zamyka się, a T2 otwiera się i tak dalej. Schemat ten całkowicie powtarza schemat napięcia w sieci 3-fazowej, ale tylko impulsy mają prostokątny kształt i częstotliwość ustawioną przez kontroler.
Rezultatem jest rodzaj cyklicznego przełączania tranzystorów, podczas gdy prąd w fazach jest przesunięty o 120º względem siebie. Aby uzyskać napięcie sterujące, składające się z wielu impulsów, w postaci sygnału sinusoidalnego o minimalnej liczbie harmonicznych, należy zastosować stosunek tranzystorów włączania i wyłączania.
Aby zminimalizować straty w silniku, które zwykle występują podczas prób sterowania poprzez zmniejszenie napięcia na uzwojeniach silnika, uciekają się do wzrostu częstotliwości.
Zasada regulacji prędkości
Aby zmienić prędkość obrotową wału silnika, należy zmienić częstotliwość f 1, ale należy to zrobić ostrożnie. W końcu konieczne jest utrzymanie prądu magnesowania na niezmienionym poziomie. Aby utrzymać tę równowagę, U 1 musi być proporcjonalna do f 1., ale jeśli równowaga zostanie zerwana, prąd magnesowania albo spadnie, albo wzrośnie. W związku z tym pole ulegnie osłabieniu lub przesyceniu. Aby to zapewnić, charakterystyka u / f jest wybierana liniowo, aż do osiągnięcia częstotliwości kątowej. Występuje, gdy napięcie na uzwojeniach wzrasta do znaku maksymalnego.